About Me
I am a junior at Boston University pursuing a degree in Computer Engineering.
My research interests lie in the fields of Robotics and Machine Learning.
Resume / CV
Education
Experience
- Over the course of 5 months at the lab, I contributed to two projects.
- My primary project involved developing a large language model (LLM) and a vision-language model (VLM) tailored for robotics applications.
- Developed algorithm in Python and C# to automate system for organizing and gathering information, enabling rapid reporting of results with enhanced efficiency.
- Over the course of 7 months at the lab, I contributed to one project.
- My main project was optimizing simulation meshes to enhance computational efficieny.
- Over the course of 3 months at the lab, I contributed to two projects.
- My main project was to develop a multiple knowledge graphs of dementia subtypes using Python.
- Over the course of 1 year and 5 months at the lab, I contributed to four projects.
- My main project was focused on developing a device for minimally invasive surgery as part of the Laparoscopy project.
Publications
T. Hong, J. Lee, B. Song, and Y.-L. Park. “Bridging High-Fidelity Simulations and Physics-Based Learning Using a Surrogate Model for Soft Robot Control.” Advanced Intelligent Systems, 30 Oct. 2025. DOI: 10.1002/aisy.202500696.
L. Kinnicutt, L. T. Gaeta, J. Rogatinsky, J. Lee, A. Cameron, A. Naik, D. Hess, and T. Ranzani. "A Soft Robotic, Modular Laparoscopic Grasper for Atraumatic Retraction of the Small Intestine," Device, Volume 2, Issue 10, October 2024, 100560, ISSN 2666-9986.
"REACTOR: Replanning and Execution with Affordance-awareContextual Tool-use for Humanoid Mobile-manipulation Reasoning," Manuscript In Progress.
“Beyond Destinations: Instruction-Aware Graph Path Planning and Navigation with OpenStreetMap,” Under Review.
L. Kinnicutt, J. Lee, J. Oden, L. T. Gaeta, S. K. Carroll, A. Rathi, Z. H. Lim, M. Lee, C. Orakwue, K. J. McDonald, D. Hess, and T. Ranzani. "A Soft Laparoscopic Grasper for Retraction of the Small Intestine," Hamlyn Symposium on Medical Robotics, London, UK, June 2023.
L. Kinnicutt, A. Pathak, T. Bohac, A. Peng, C. Taglietti, C. Lee, R. Rauf, J. Lee, LZ. Heng, J. Rogatinsky, K. McDonald, J. Siracuse, and T. Ranzani. "Minimally Invasive Soft Robotic Prototypes Provide Variable Occlusion in a Simplified Aortic Flow Model," American Heart Association Resuscitation Science Symposium, Chicago, US, November 2022.
Activities & Leadership Experience
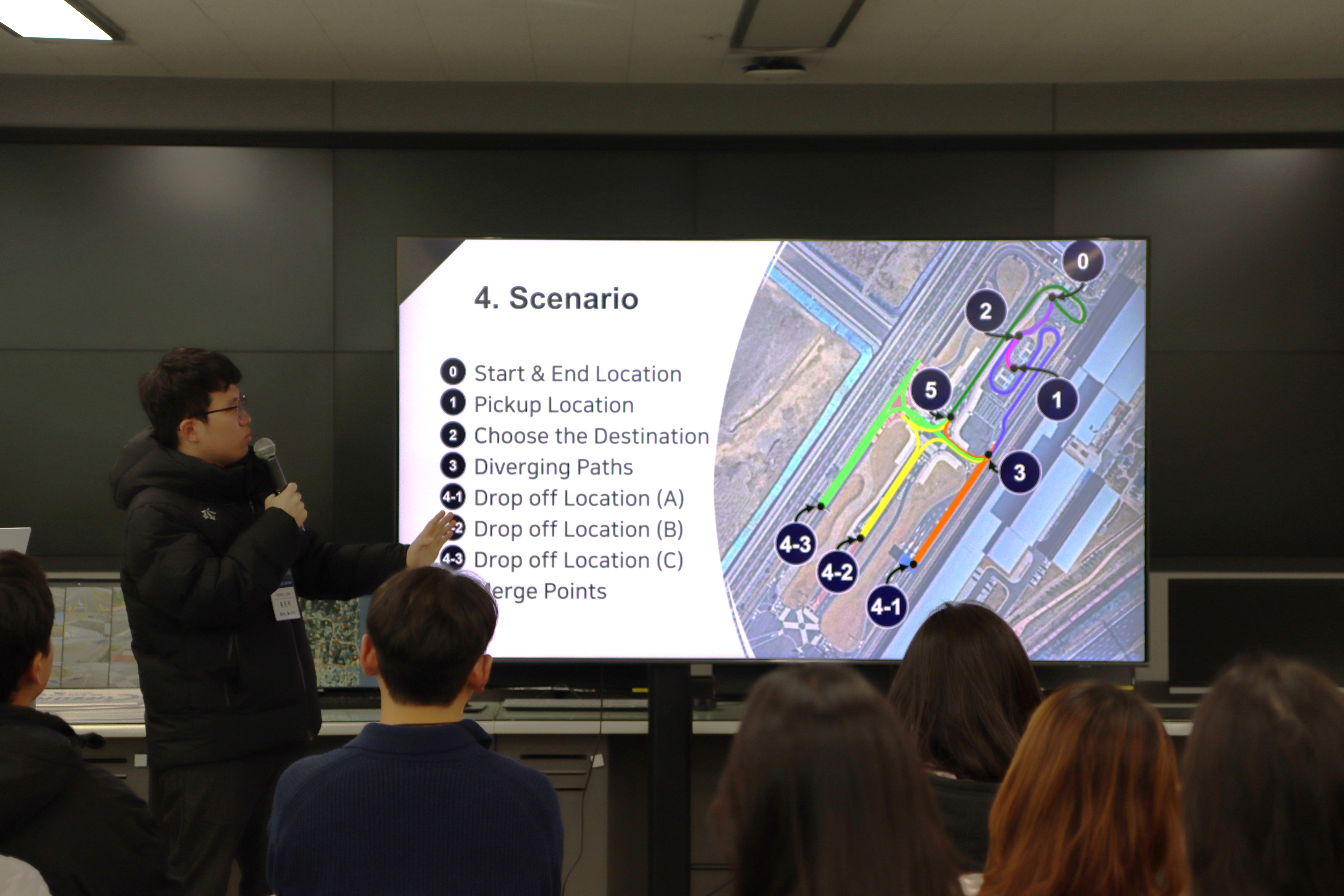
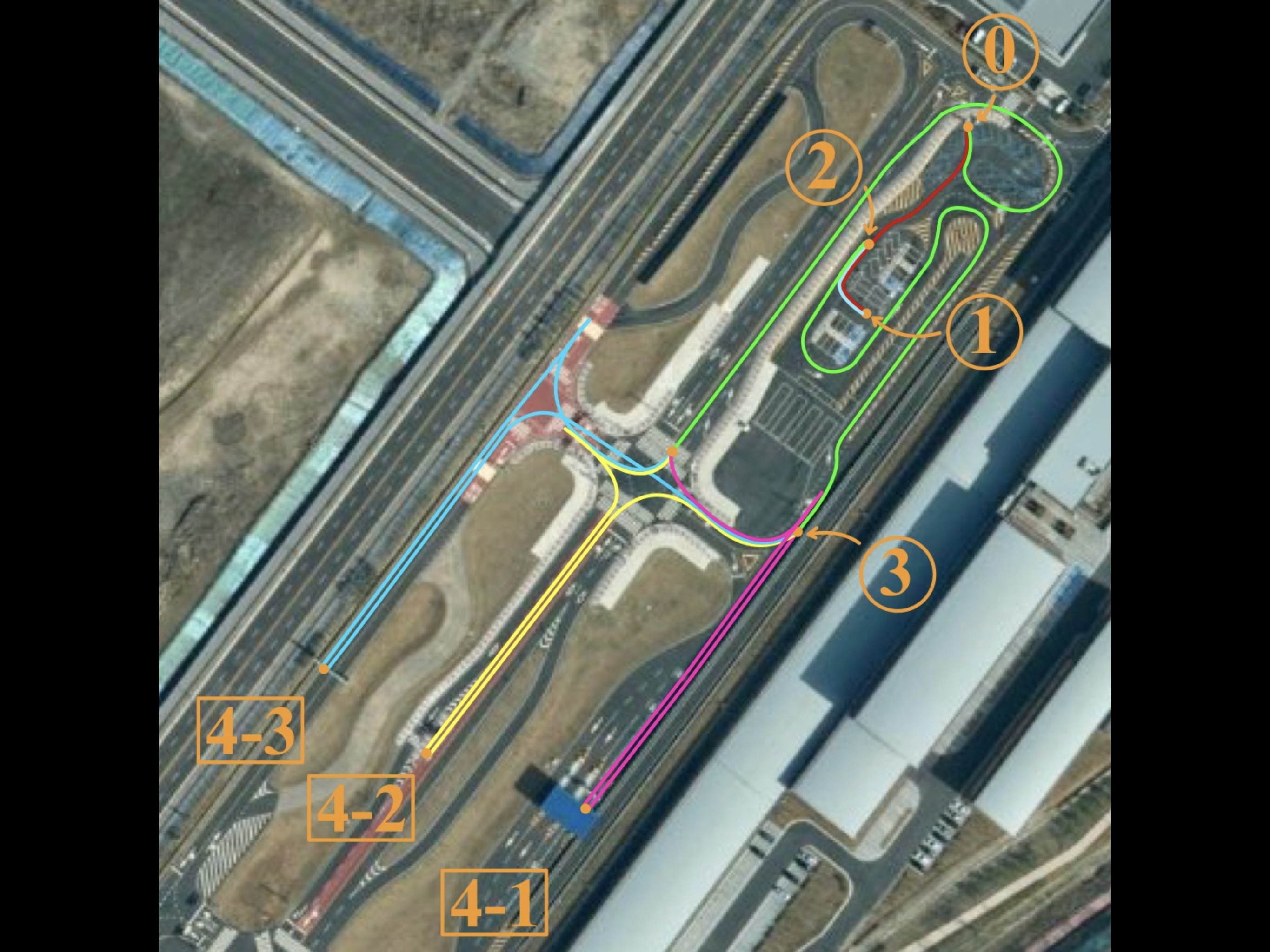
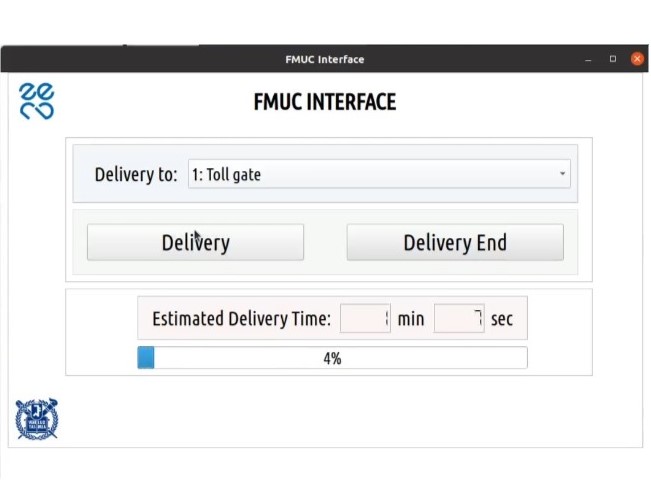
- Projects: QGIS Clothoid Path | FMUC GUI Interface
- Led weekly meetings, secured a workspace, and organized workshops to boost team engagement and knowledge-sharing.
- Contributed to the transition to ROS 2 in preparation for ROS 1 deprecation, gaining proficiency in core functionalities and best practices while implementing and executing basic ROS 2 software.
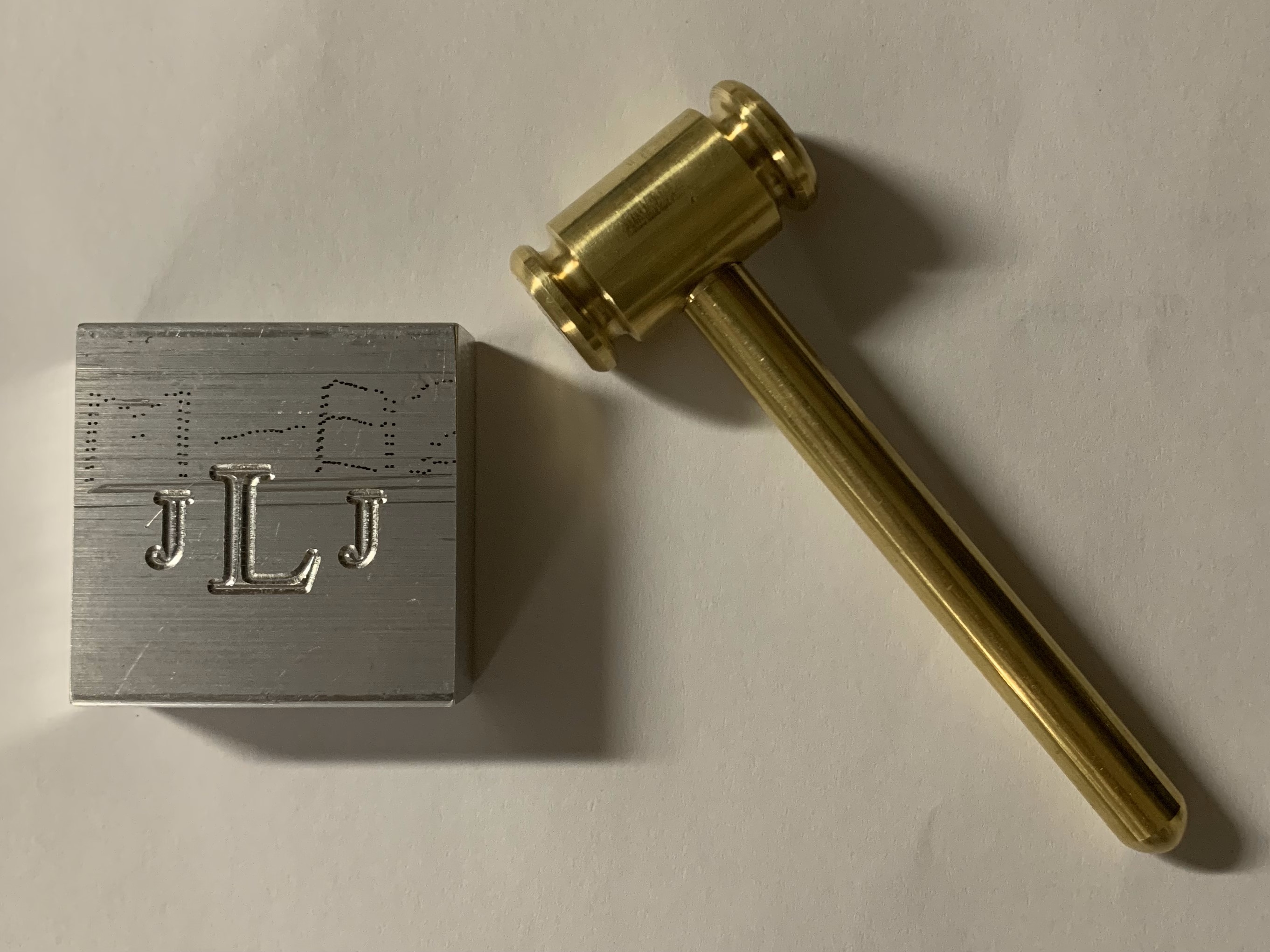
- Projects: Robotics End Effector
- Oversaw safety for 80+ members, led safety training, and secured $22,000 in funding through corporate and university sponsorships for materials and tests.
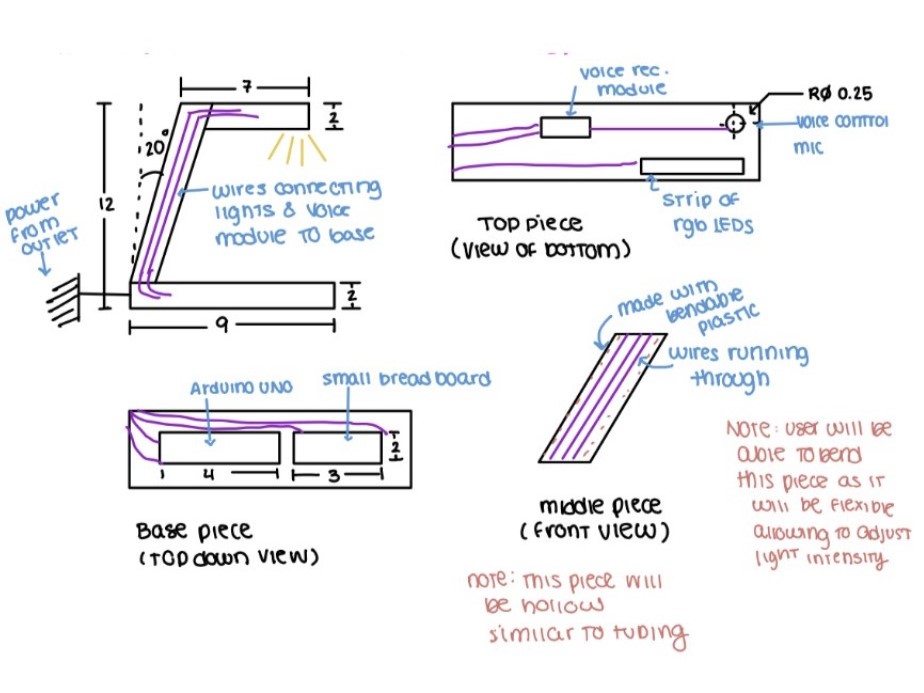
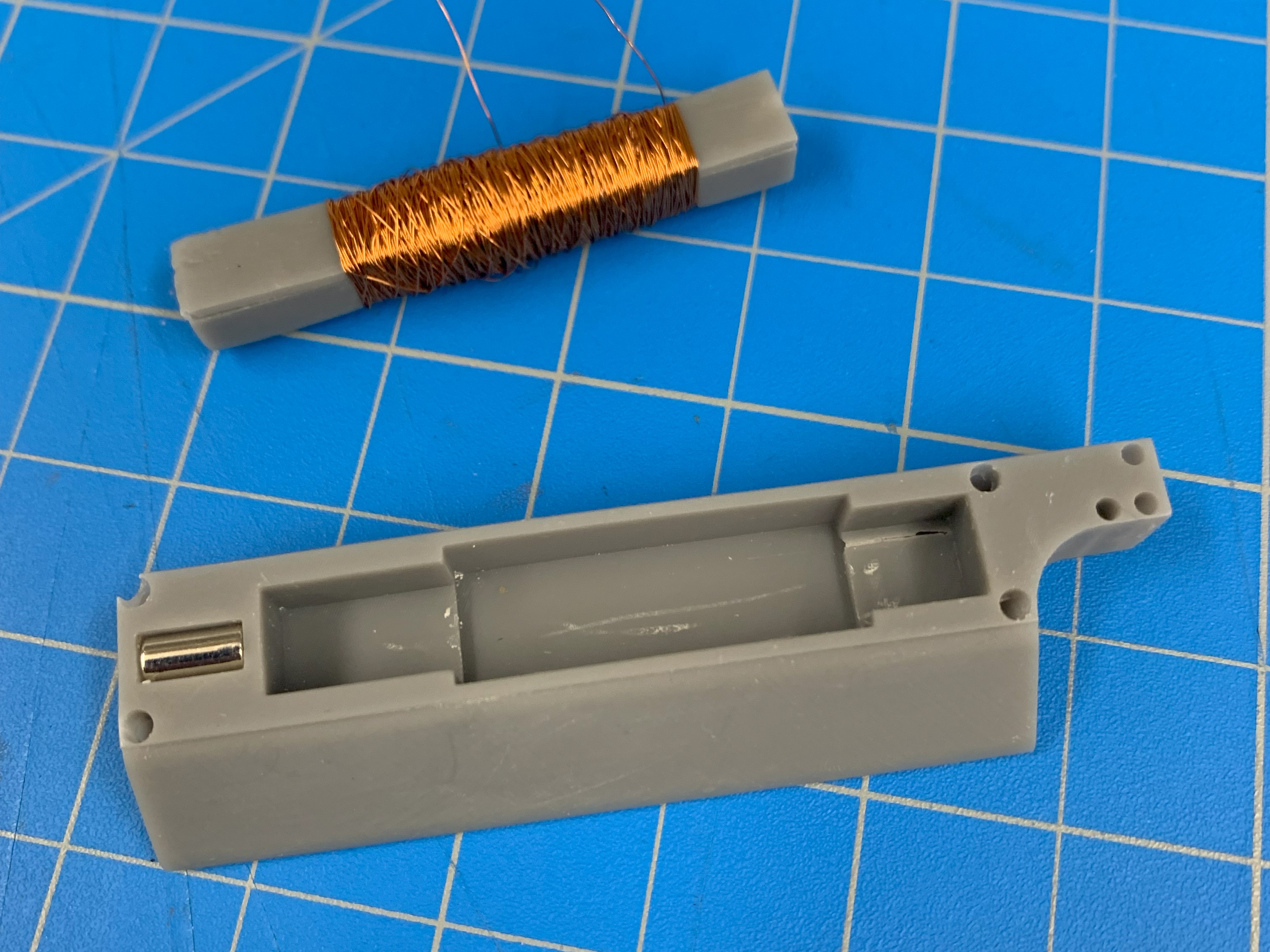
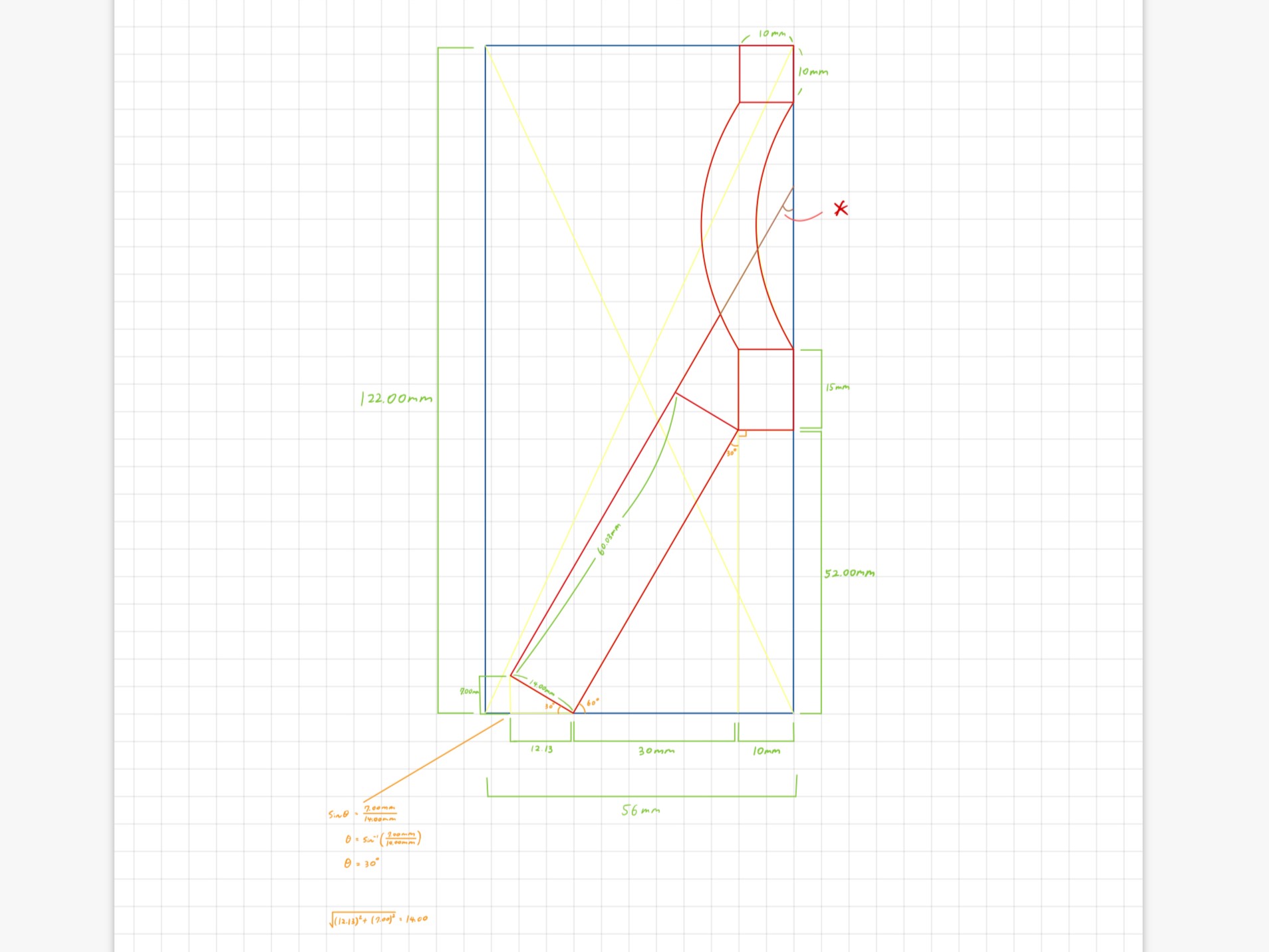
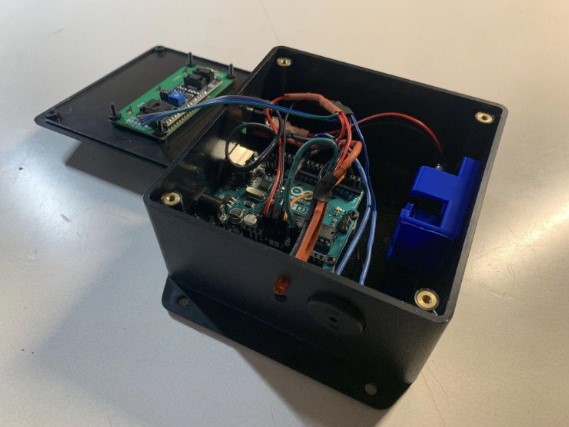
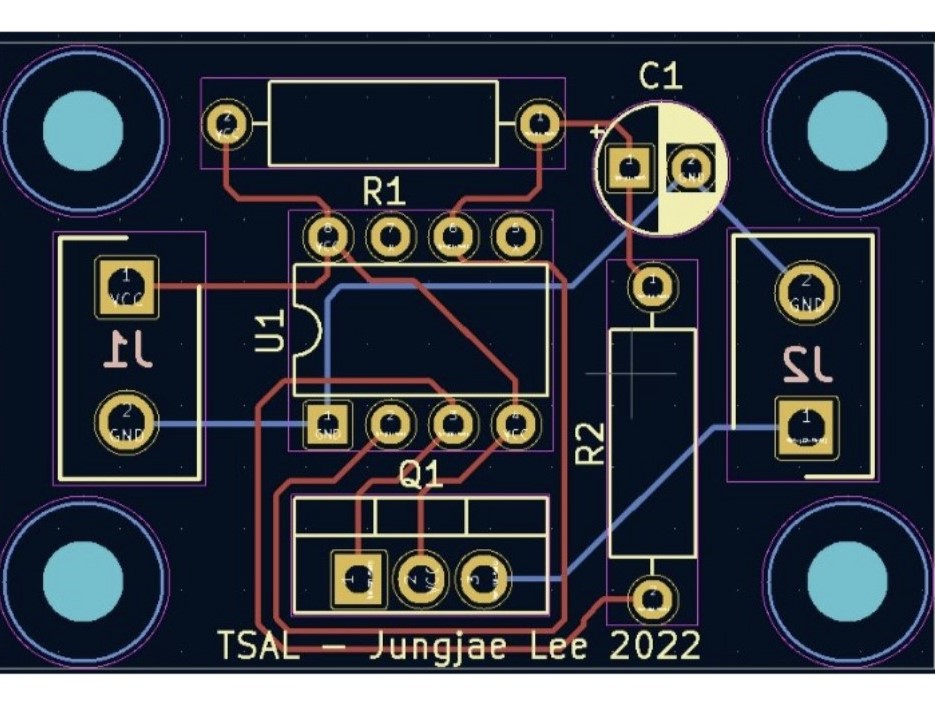
- Projects: Tractive System Active Lamp (TSAL) | Failure Mode and Effects Analysis (FMEA)
Awards & Honors
- 3rd place at the 2023 International EV Competition, Korea Autonomous Testing & Research Institute
- 4th place at the 2023 Autonomous Driving Software Advancement Competition, Future Mobile Technology Center
- Student Research Award (SRA) - $1,500 Research Grants, Boston University
- George Eastman Young Leaders Award, University of Rochester
- Maine Coastal Cleanup Recognition, Maine Department of Marine Resources
Engineering Projects

Zero, Autonomous Vehicle
Zero, Autonomous Vehicle
ENG EK 210: Engineering Design
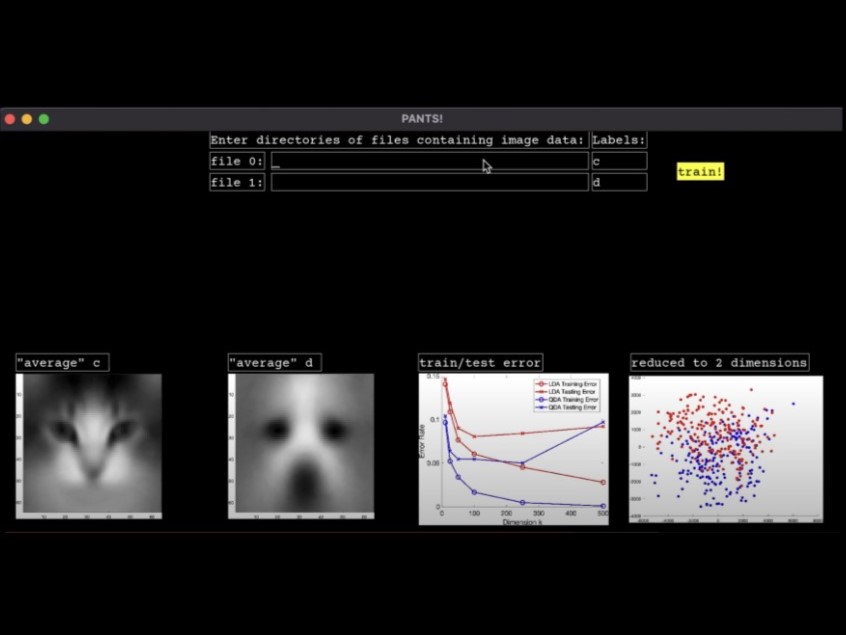
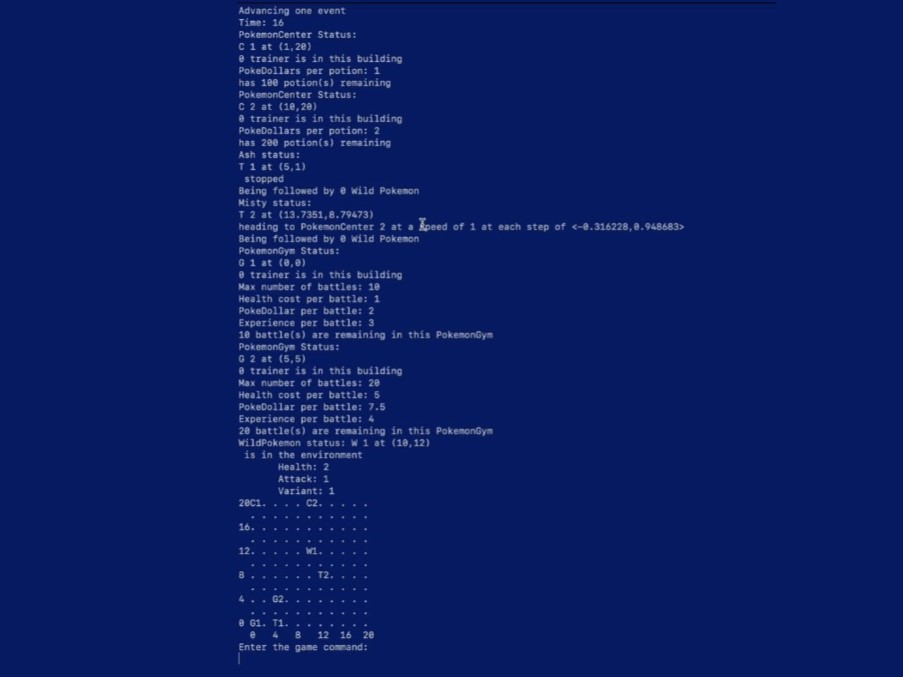
ENG EC 327: Software Engineering
Terrier Motorsport, Formula SAE

Mars Rover, Robotics
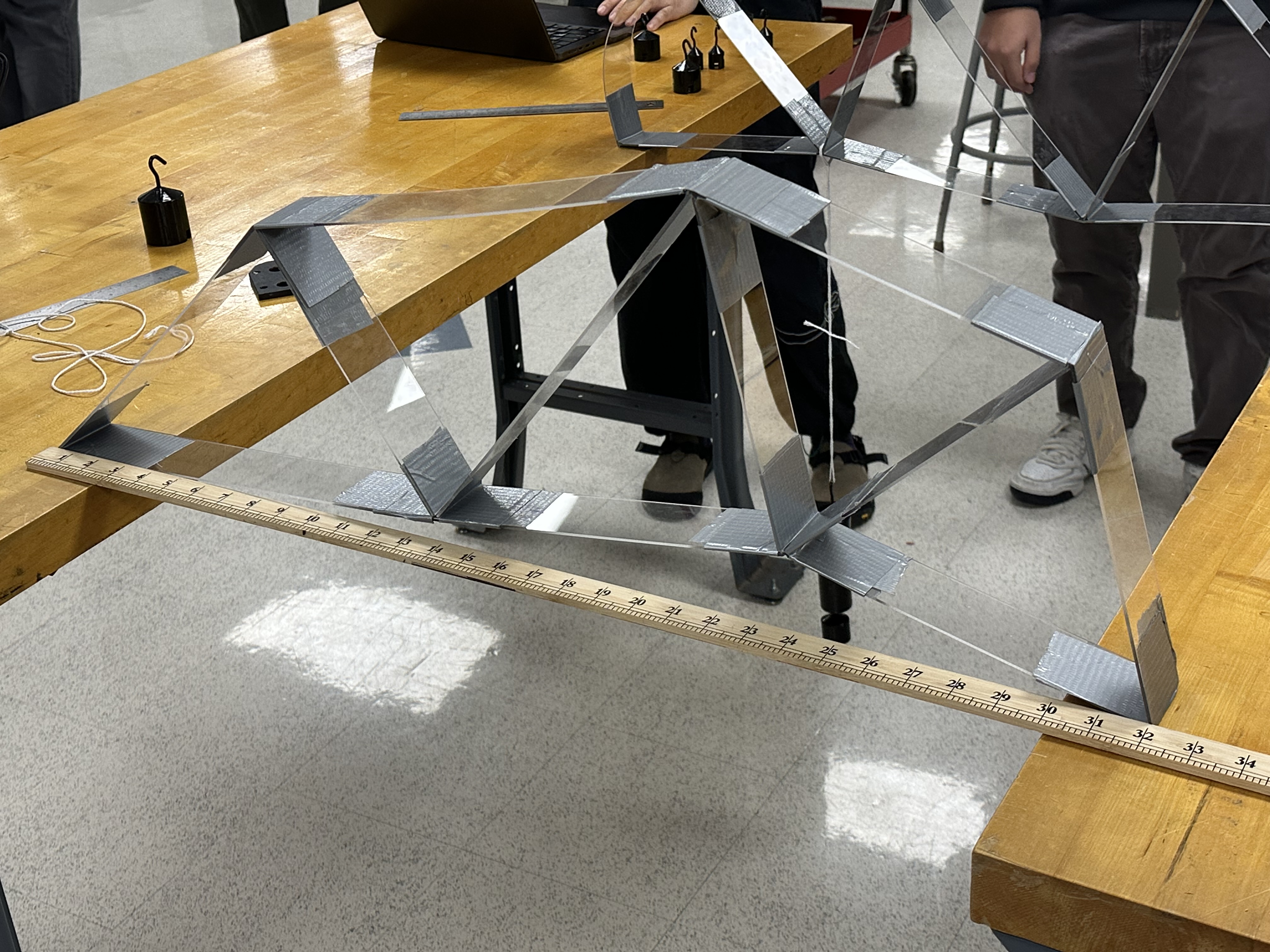
ENG EK 131: Engineering Hands On
Terrier Motorsport, Formula SAE
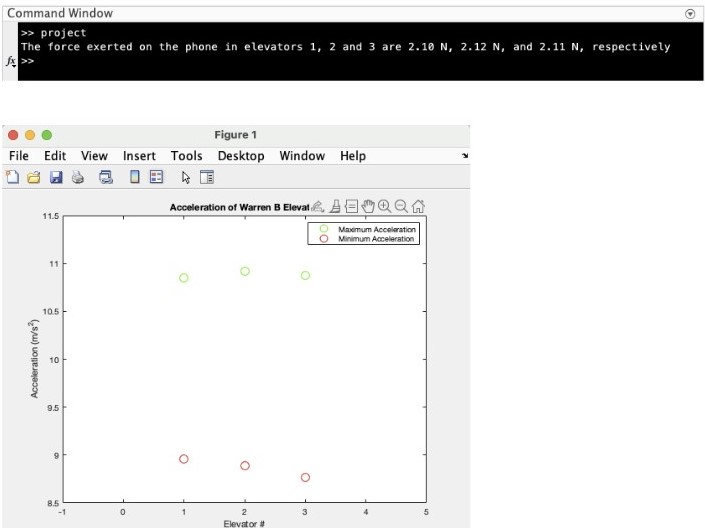
ENG EK 125: Programming
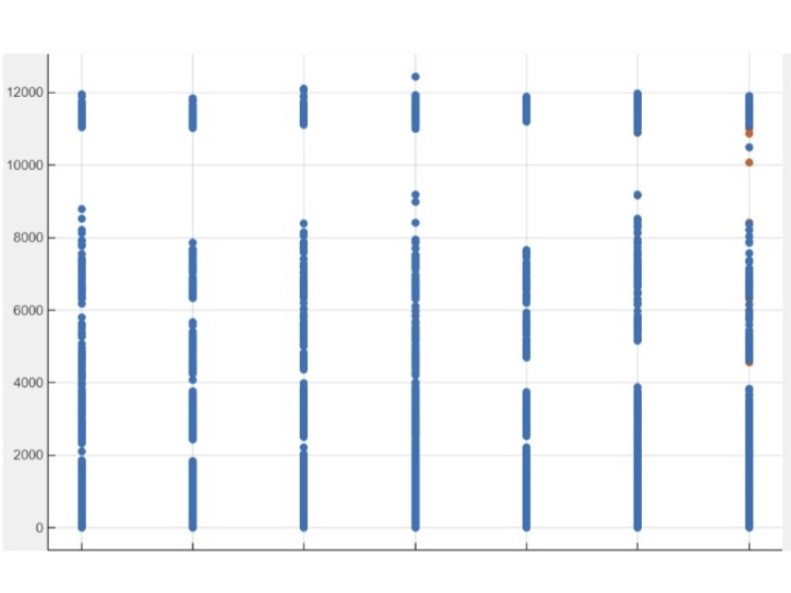
ENG EK 125: Programming
Gallery