Dept. of Mechanical Engineering
Boston University
We focuses on robotics, and how robotic technologies can impact society.
We are particularly interested in how robotics can improve our lives and create new
opportunities in fields like medicine, surgery, rehabilitation, and exploration.
In September 2022, I had the honor of receiving the Student Research Award (SRA) from Undergraduate Research Opportunity Program (UROP) for my work on the Laparoscopy project.
This award is recognized for its competitiveness, having been conferred upon only 180 students at Boston University in Fall 2022.
Publications
L. Kinnicutt, L. T. Gaeta, J. Rogatinsky, J. Lee, A. Cameron, A. Naik, D. Hess, and T. Ranzani.
Device, Volume 2, Issue 10, October 2024, 100560, ISSN 2666-9986.
ScienceDirect ResearchGateL. Kinnicutt, J. Lee, J. Oden, L. T. Gaeta, S. K. Carroll, A. Rathi, Z. H. Lim, M. Lee, C. Orakwue, K. J. McDonald, D. Hess, and T. Ranzani.
Hamlyn Symposium on Medical Robotics, London, UK, June 2023.
ResearchGateL. Kinnicutt, A. Pathak, T. Bohac, A. Peng, C. Taglietti, C. Lee, R. Rauf, J. Lee, LZ. Heng, J. Rogatinsky, K. McDonald, J. Siracuse, and T. Ranzani.
American Heart Association Resuscitation Science Symposium, Chicago, US, November 2022.
Projects
Time Commitment: Jan. 2022 - May. 2023
Skills: Prototyping, Python, MATLAB, CAD (Solidworks)
- Assisted in conducting strength testing, including blocked force and grip tests, to evaluate the reliability of actuators.
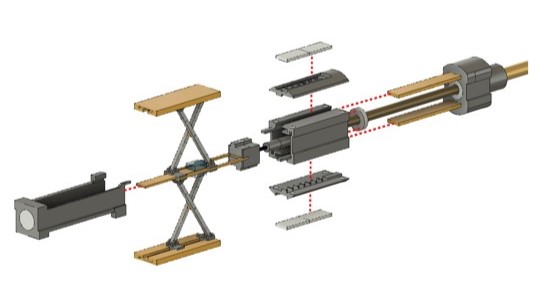
- Constructed a miniaturized scissor lift mechanism for the actuator using compact materials, enabling the grasper to grasp objects by adjusting the separation between the actuators.
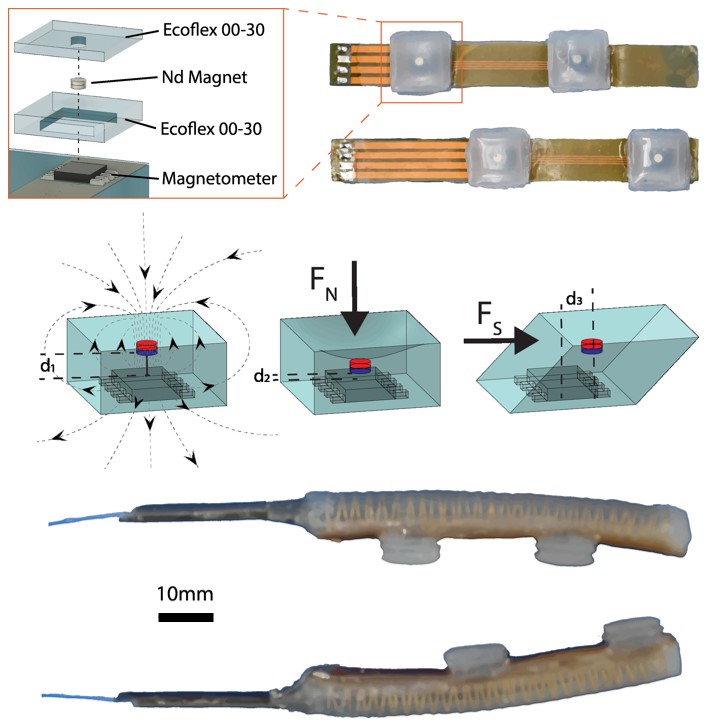
- Created soft force sensors using a triple-axis magnetometer and a magnet to transduce a 3D magnetic field vector output.

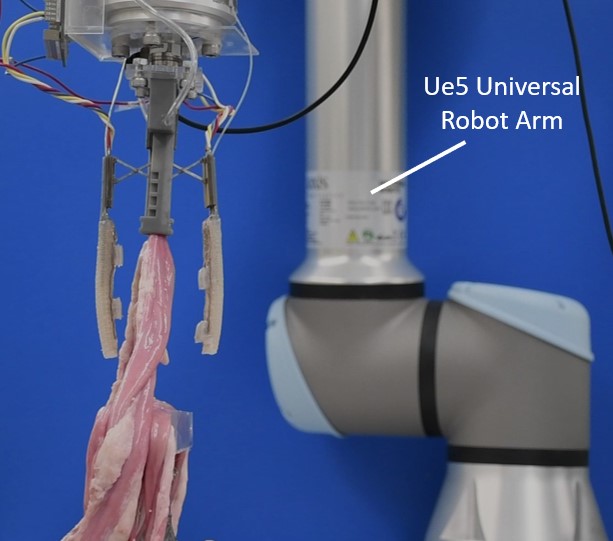
- Developed silicone pneumatic actuators to establish reliable grips on abdominal organs during surgical procedures.
Time Commitment: May. 2022 - Aug. 2022
Skills: EDA (EagleCAD)
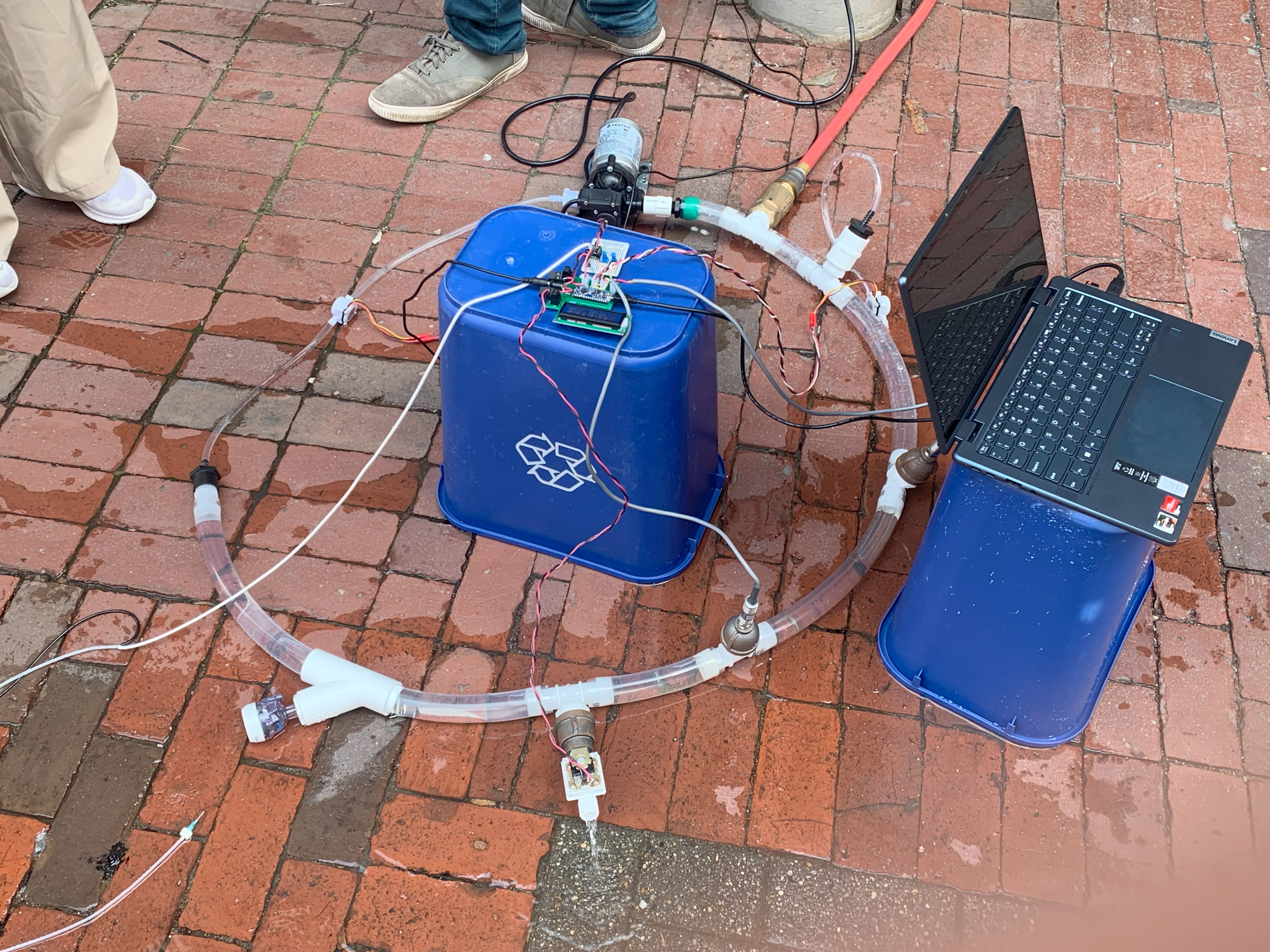
- Assisted in the assembly of an in-vitro setup for cardiovascular system, including securing components and establishing connections to ensure proper functionality.
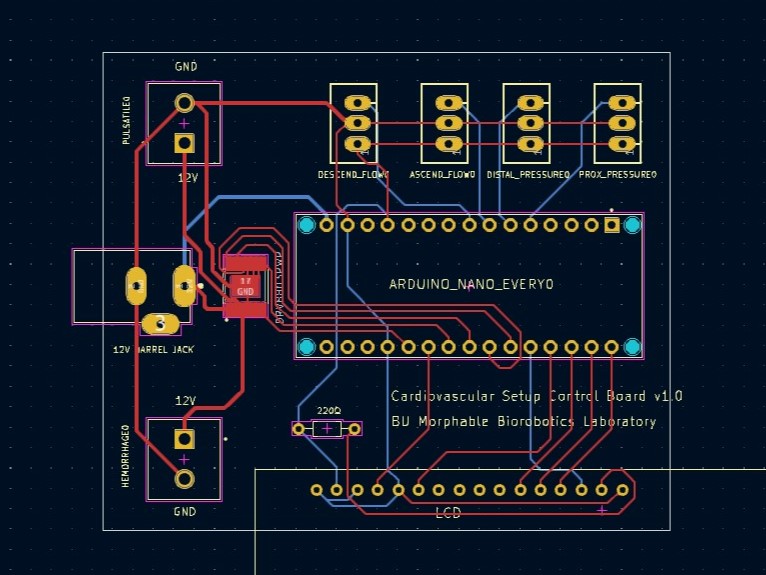
- Designed PCB using EagleCAD to control valves and pumps in an in-vitro setup that mimics cardiovascular system, enabling team to conduct testing on endovascular device.
Time Commitment: May. 2022 - Aug. 2022
Skills: Python, MATLAB
- Integrated a custom Python code with an open-source library to manage data acquisition from an electromagnetic position tracking system and visualize workspace of a surgical soft robotic end effector.
Time Commitment: Jan. 2022 - Mar. 2022
Skills: Prototyping

- Developed soft wearable device prototype with exoflex to test durability and performance of device.
- Conducted tests to determine the most appropriate torsion calculations for the prototype and verified that the material interfaces meet the intended specifications.
- Developed a prototype of optical sensors for soft wearable devices to detect leg and arm movements and analyzed the data using a microcontroller and MATLAB.